
I'm an MSc researcher in Computer Engineering (AI) at the University of Genoa,
working as a Research Assistant at CNR within the EU Horizon Europe project REXASI-PRO.
My thesis investigates the reliability of pretrained neural motion prediction models
for autonomous wheelchair navigation — understanding when and why they fail under varying input conditions.
🔹 TrustRAG — Production RAG with Systematic Evaluation
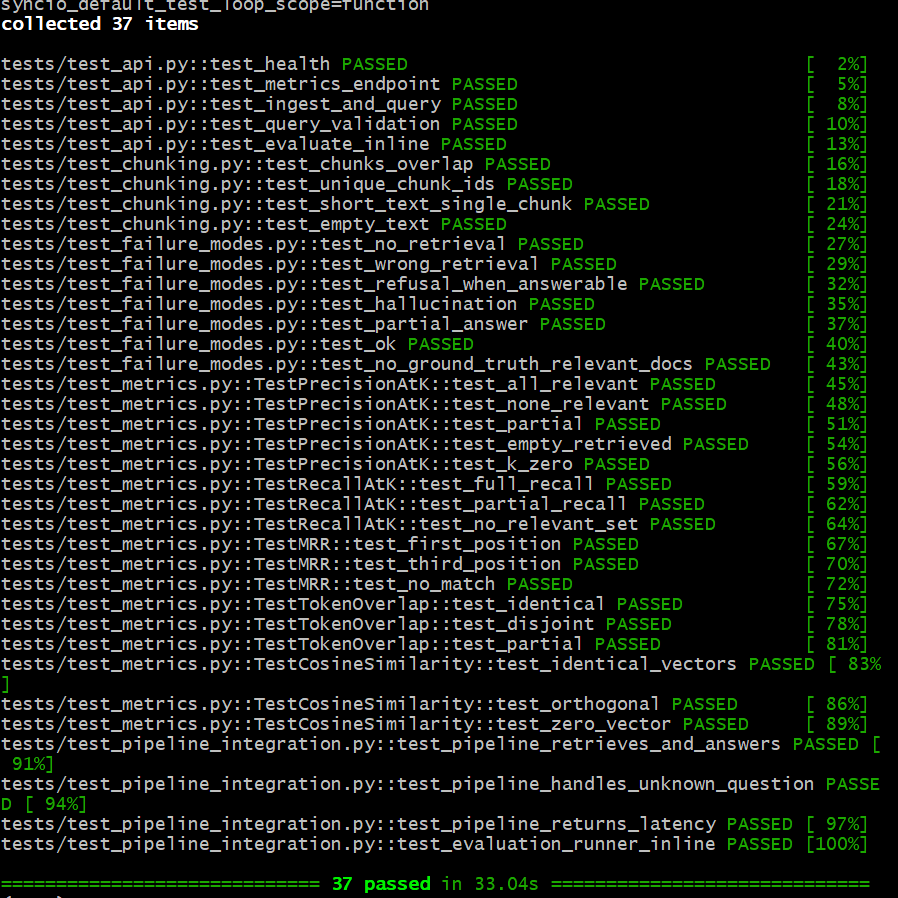
End-to-end Retrieval-Augmented Generation system with a built-in evaluation and failure analysis framework.
- Failure-mode classifier tagging every output as one of 6 interpretable types
(no_retrieval,wrong_retrieval,hallucination,refusal_when_answerable,partial_answer,ok) - Retrieval metrics: Precision@k, Recall@k, MRR
- LLM-as-judge faithfulness scoring
- Pluggable backends: OpenAI · Anthropic · local Ollama
Benchmark: Recall@k 0.90 · MRR 0.83 · Latency 2.4ms · 37 tests · CI on every commit
Stack: Python · FastAPI · ChromaDB · Docker · GitHub Actions
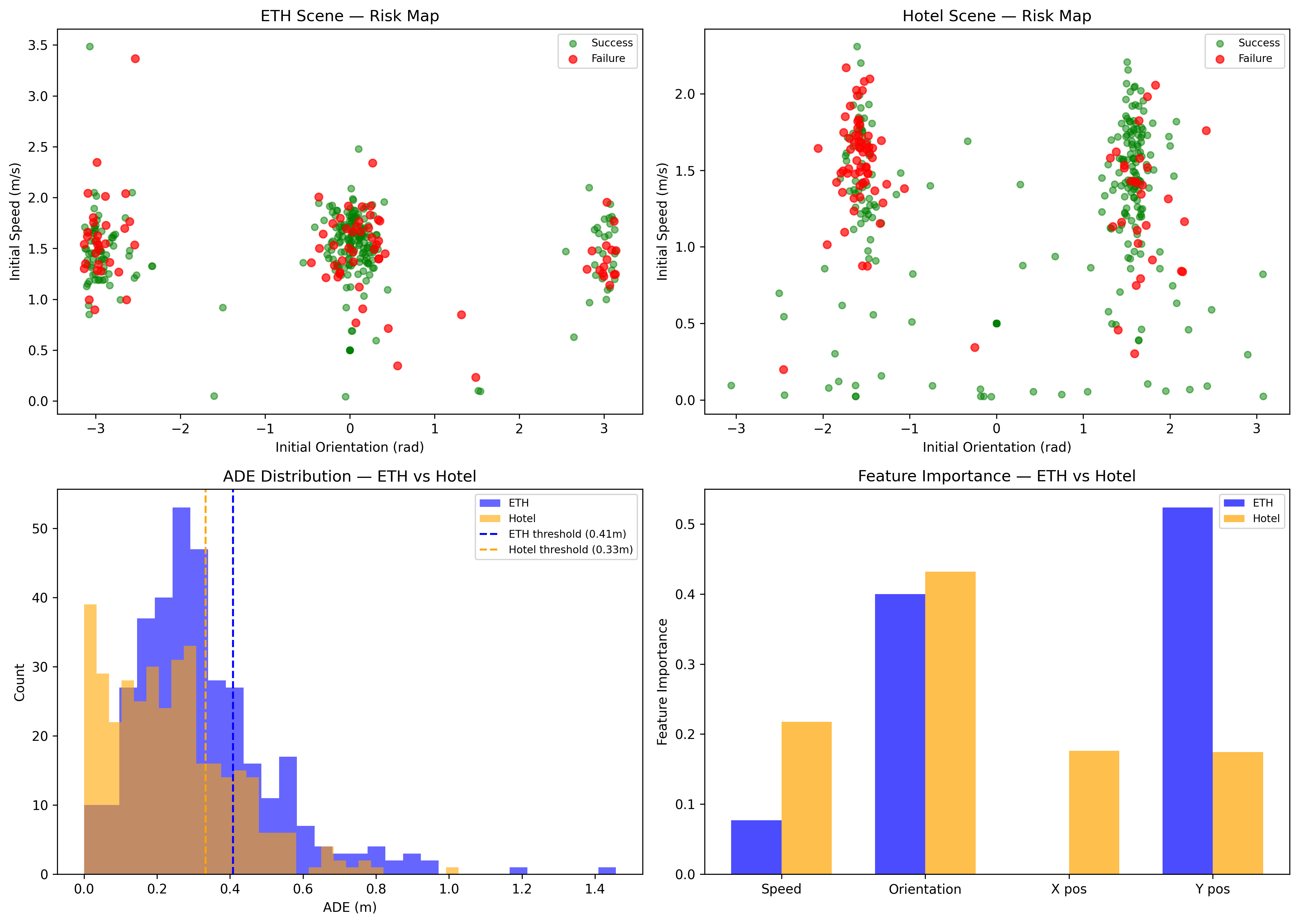
🔹 Trajectory Failure Analysis — Interpretable Risk Modeling for Motion Prediction
Preprint (PDF available) — ETH Pedestrian Dataset
A model-agnostic framework for analyzing failure modes in trajectory prediction systems, evaluated on real-world pedestrian data.
- Input-space sensitivity analysis (orientation–velocity risk regions)
- Interpretable decision tree models for failure rule extraction
- Cross-scene generalization analysis (ETH vs Hotel)
Key Insight: Initial orientation is a dominant global risk factor, while positional features are scene-dependent — indicating limited transferability of failure rules.
📄 Read Paper
📊 Code & Experiments
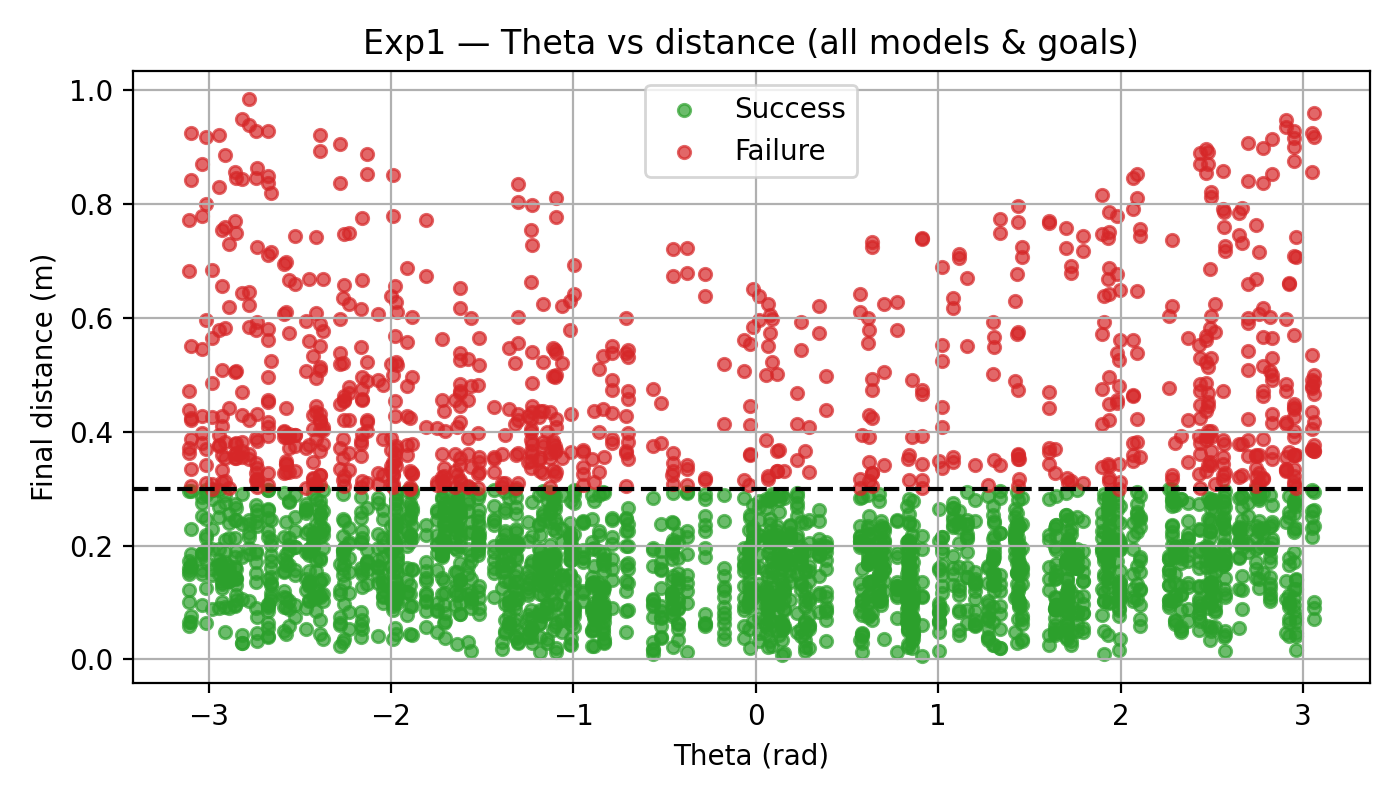
MSc Thesis — University of Genoa / CNR / REXASI-PRO
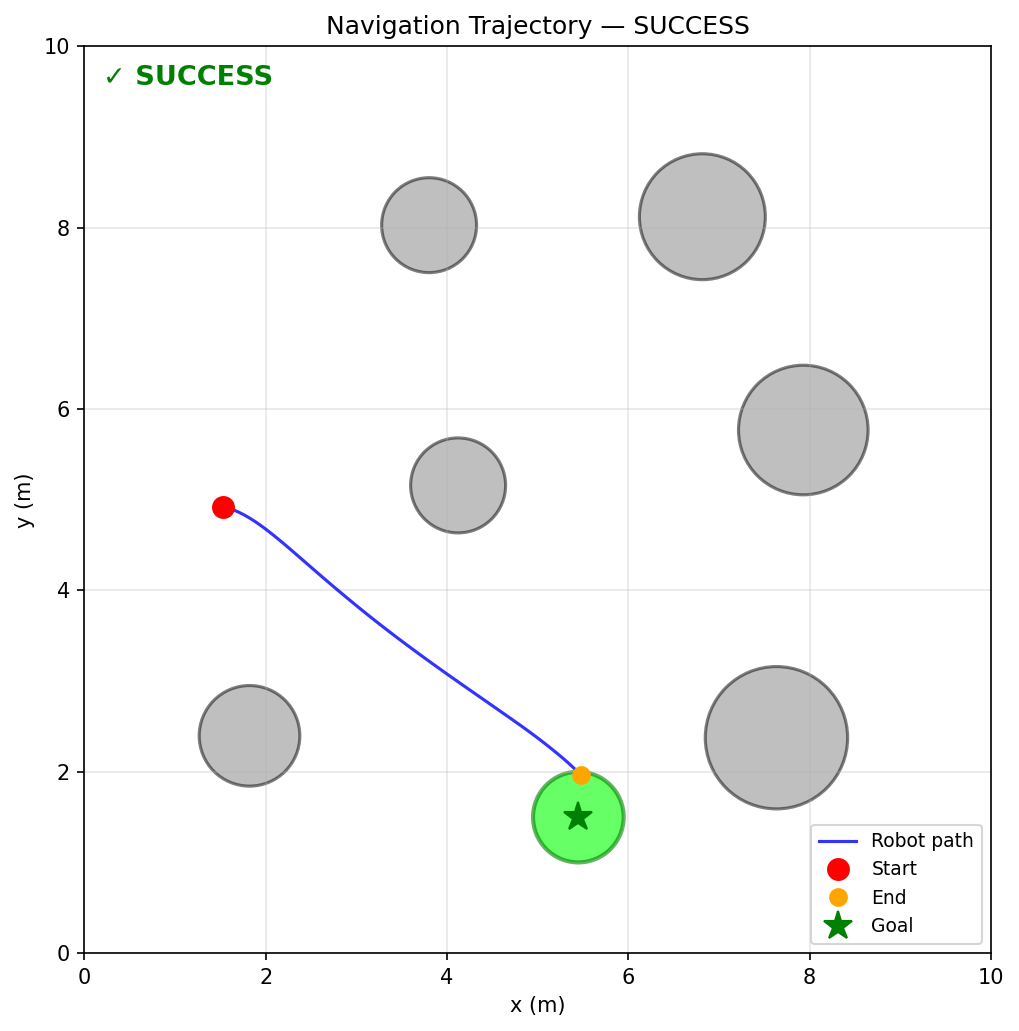
Trajectory-level evaluation of pretrained DNN-LNA neural models for autonomous wheelchair navigation.
- Input sensitivity analysis — orientation φ is the dominant risk factor (failures near ±π)
- Goal difficulty mapping — spatial failure patterns across the workspace
- Comparative evaluation of 5 neural architectures (success rates: 25.3% → 99.3%)
Demo:
Trajectory Behaviour Analysis Toolkit
Modular Python toolkit for trajectory risk scoring, failure-case analysis, and interpretable ML explanations.
Includes an interactive Streamlit dashboard — try it live!
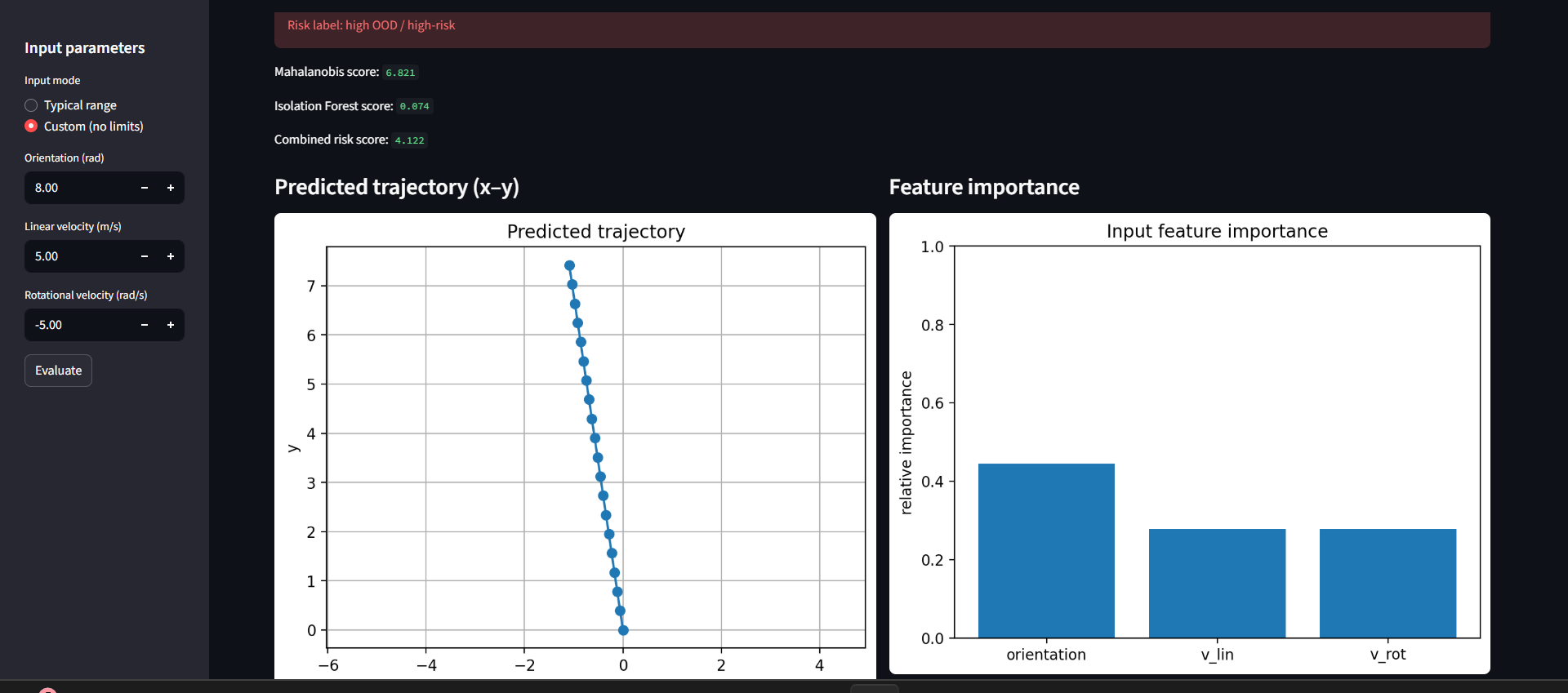
- REST API endpoint for trajectory risk scoring (FastAPI)
Safety-Constrained RL for Assistive Robot Navigation
PPO agent with CBF safety layer and curriculum learning for obstacle avoidance navigation.
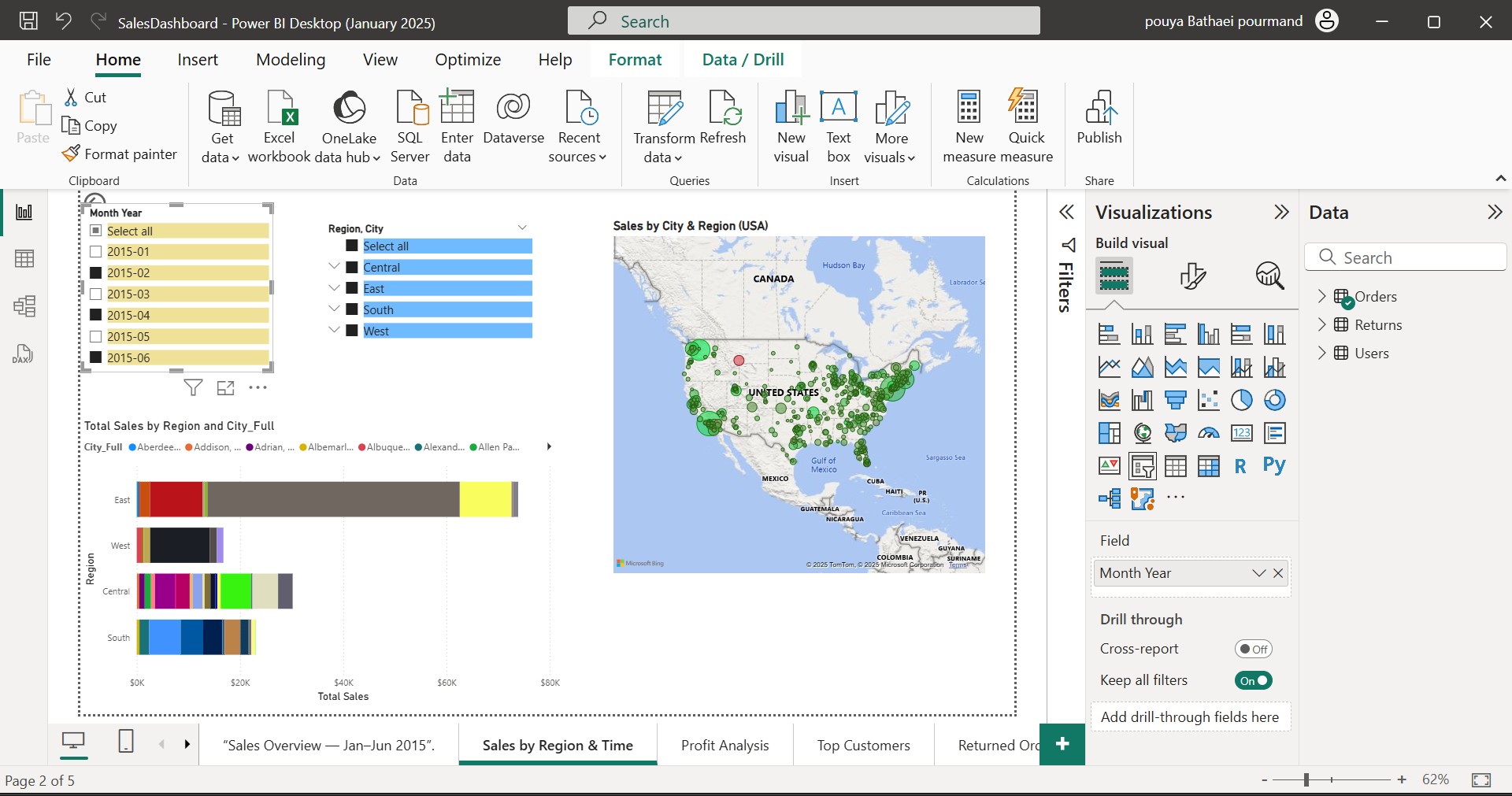
End-to-end BI workflow — Python, SQL, and Power BI dashboard.
AI & ML — Python · PyTorch · scikit-learn · NumPy · pandas
LLM & RAG — OpenAI API · Anthropic API · ChromaDB · sentence-transformers · FastAPI
MLOps — Docker · GitHub Actions CI · pytest · Prometheus · structlog . Git